Individual assignment:
Write an application that interfaces a user with an input and/or output device that you made.
Introduction
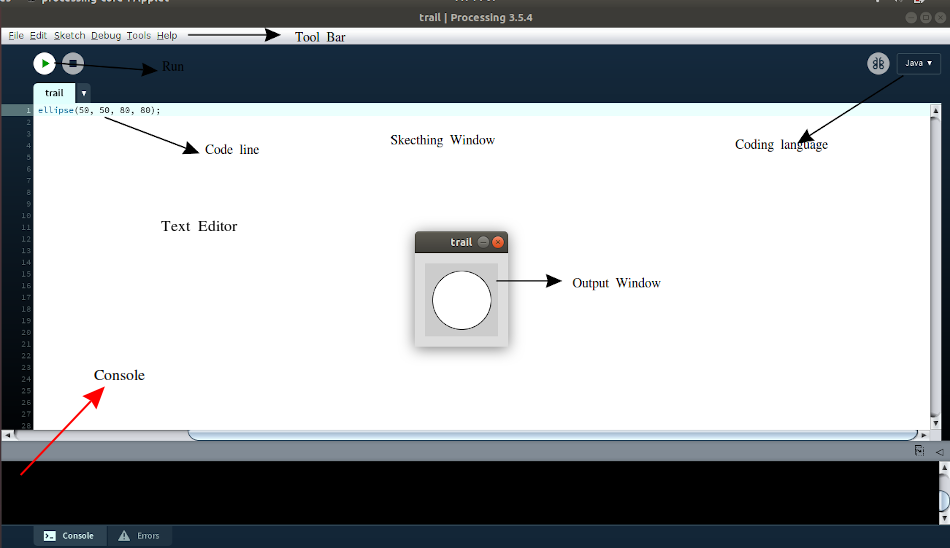
This week I designed and developed an interface using a servo motor with my input week’s board. I used the ‘Processing’ tool to create a GUI (graphical user interface)
Processing
Processing is a flexible software sketchbook and a language for learning how to code within the context of
the visual arts.
 Downloaded the packages from here
Downloaded the packages from here
Processing usually uses Java Programming. It also supports python programming.
I started using java for the coding in processing. I have little knowledge in java and Tutorials available in processing helped me to build my application and finally to complete my assignment.
First I created an ellipse using below code line
ellipse(50, 50, 80, 80);
Then I tested an interactive one
void setup() {
size(480, 120);
}
void draw() {
if (mousePressed) {
fill(0);
} else {
fill(255);
}
ellipse(mouseX, mouseY, 80, 80);
}
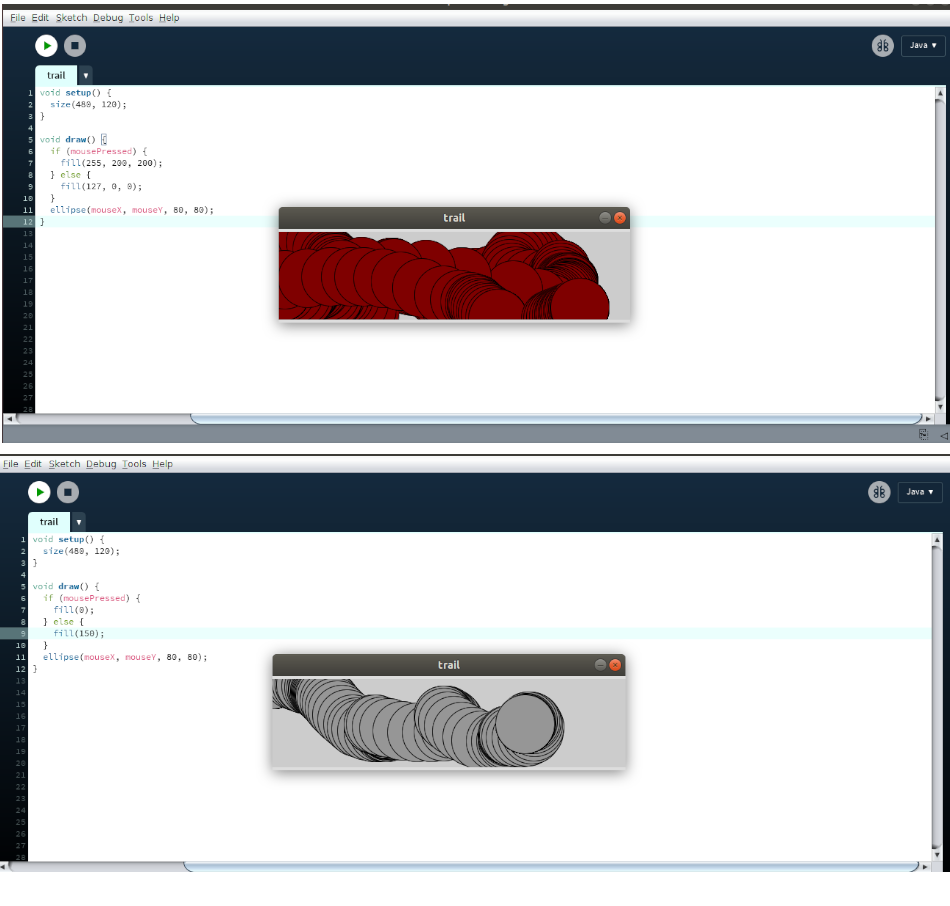
This program creates a window of size 480 pixel X 120 pixel.When a mouse button is pressed, the circle color changes to black. I also tried with red color, This can be done by changing values in the “fill()” function
My references
‣ Programming for my assignment
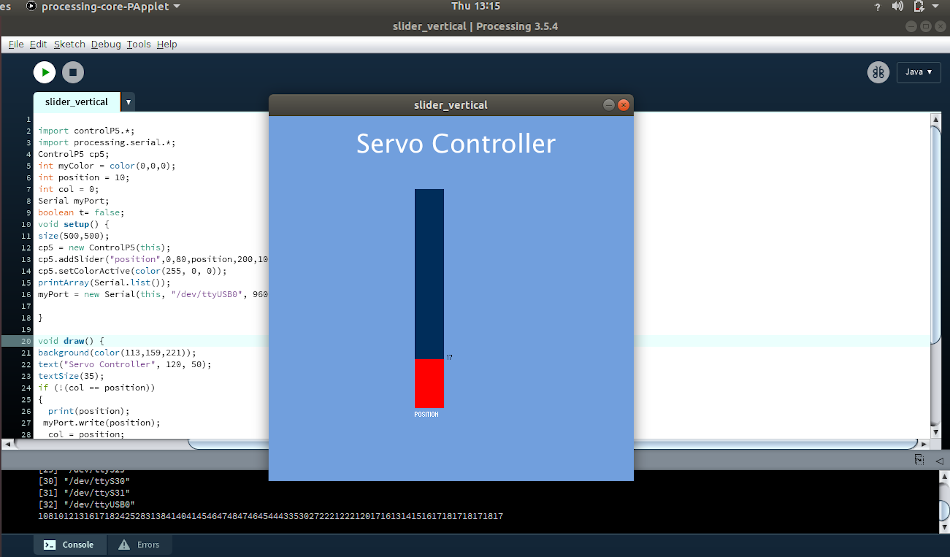
I intended to develop an application to control the servo motor. I designed a slider on the interactive window to send an angle value to the servo motor.
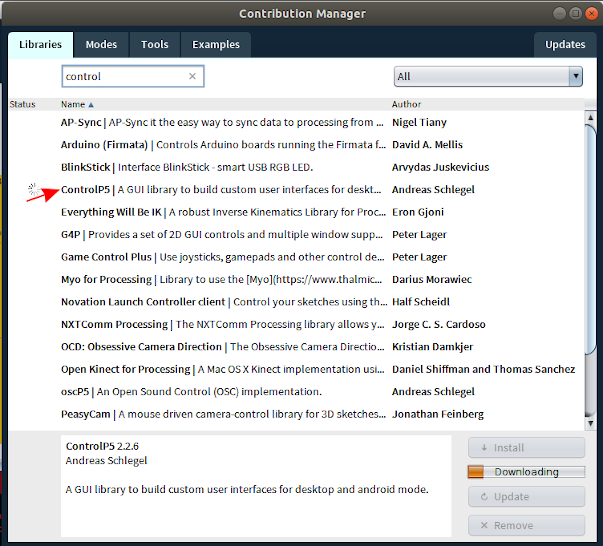
First I added library “controlp5” This helps to build a graphical user interface on top of your processing sketch like Sliders, Buttons, Toggles etc.
Click ‘Sketch” - select ‘ import sketch’ then add ‘ New library’
Some functions i have used is explained below
Syntax: addSlider(theName, theMin, theMax, theDefaultValue, theX, theY, theW, theH)
his function craetes a slider. A slider is either used horizontally or vertically. when adding a slider to controlP5, the width is compared against the height. if the width is bigger, you get a horizontal slider, is the height bigger, you get a vertical slider.
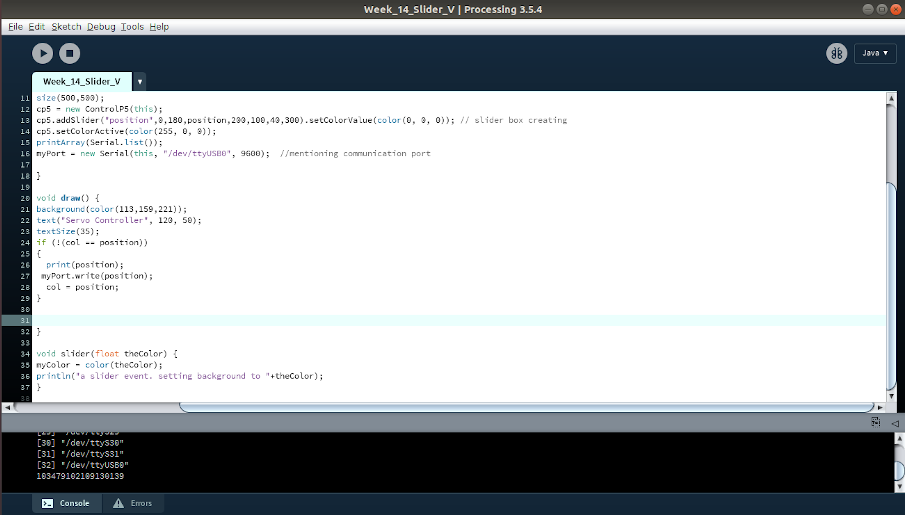
I created a vertical slider. cp5.addSlider("position",0,180,position,200,100,40,300)
myPort = new Serial(this, "/dev/ttyUSB0", 9600);
This code line set the communication port. For my ubuntu OS it is "/dev/ttyUSB0".
background(color(113,159,221));. This function set the background color.
Gets a list of all available serial ports.println() to write the information to the text window.
Send a data out the serial port
import controlP5.*;
import processing.serial.*;
ControlP5 cp5;
int myColor = color(0,0,0);
int position = 10;
int col = 0;
Serial myPort;
boolean t= false;
void setup() {
size(500,500);
cp5 = new ControlP5(this);
cp5.addSlider("position",0,180,position,200,100,40,300).setColorValue(color(0, 0, 0)); // slider box creating
cp5.setColorActive(color(255, 0, 0));
printArray(Serial.list());
myPort = new Serial(this, "/dev/ttyUSB0", 9600); //mentioning communication port
void draw()
{
background(color(113,159,221));
text("Servo Controller", 120, 50);
textSize(35);
if (!(col == position))
{
print(position);
myPort.write(position);
col = position;
}
}
void slider(float theColor)
{
myColor = color(theColor);
println("a slider event. setting background to "+theColor);
}
‣ Programming the ATtiny 84 board
I used my input week’s board for assignment. Using Arduino IDE I uploaded a simple program for servo sweep. The input angle is received from application through FTDI. Declare the serial communication port, select the proper board’ ATtiny 84’,’ internal clock 8 MHz’. I declared Pin 12 of Attiny 84 for PWM.
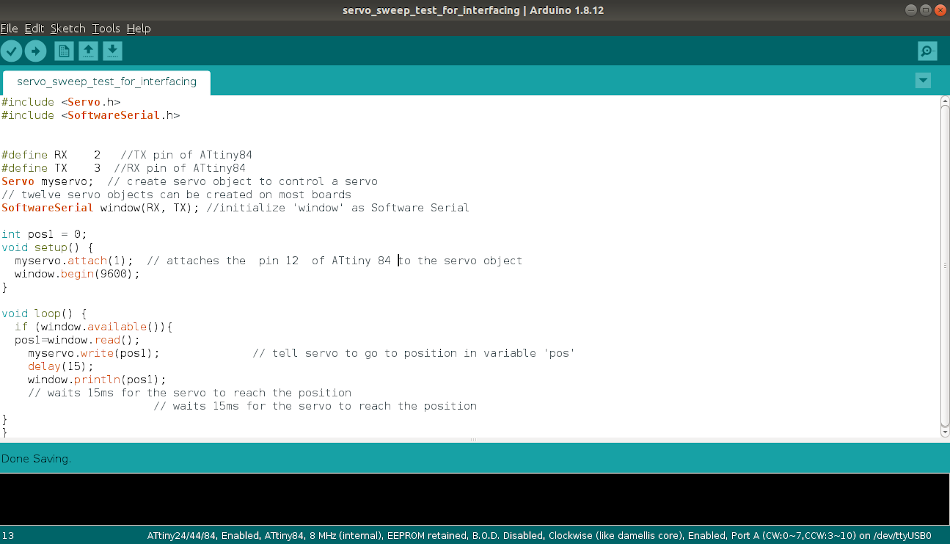
Arduino Code
#include#include #define RX 2 //TX pin of ATtiny84 #define TX 3 //RX pin of ATtiny84 Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards SoftwareSerial window(RX, TX); //initialize 'window' as Software Serial int pos1 = 0; void setup() { myservo.attach(1); // attaches the pin 12 of ATtiny 84 to the servo object window.begin(9600); } void loop() { if (window.available()){ pos1=window.read(); myservo.write(pos1); // tell servo to go to position in variable 'pos' delay(15); window.println(pos1); // waits 15ms for the servo to reach the position // waits 15ms for the servo to reach the position } }
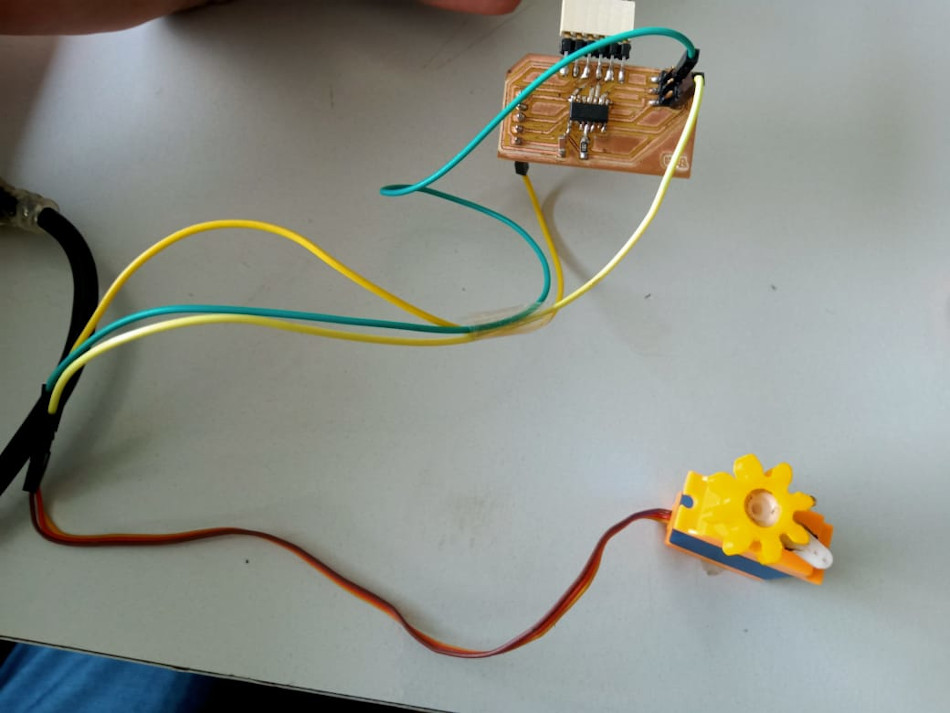
Interfacing Application, Board and Servo motor
After coding the board we can connected the board using FTDI cable.From board to servo motor i used jumper wire. I refered my input week schematci diagram for identifying the pins.
Working Video
Group Assignment
Compare as many tool options as possible.
Link to week13- Networking and communication grop assignment page